Sensing
- Full-body tactile skin
- Distributed touch and force sensing
- Contact and pressure detection
- Micro-interaction sensing across the robot surface
- Visual perception for industrial tasks
- Welding seam monitoring for shipyard applications
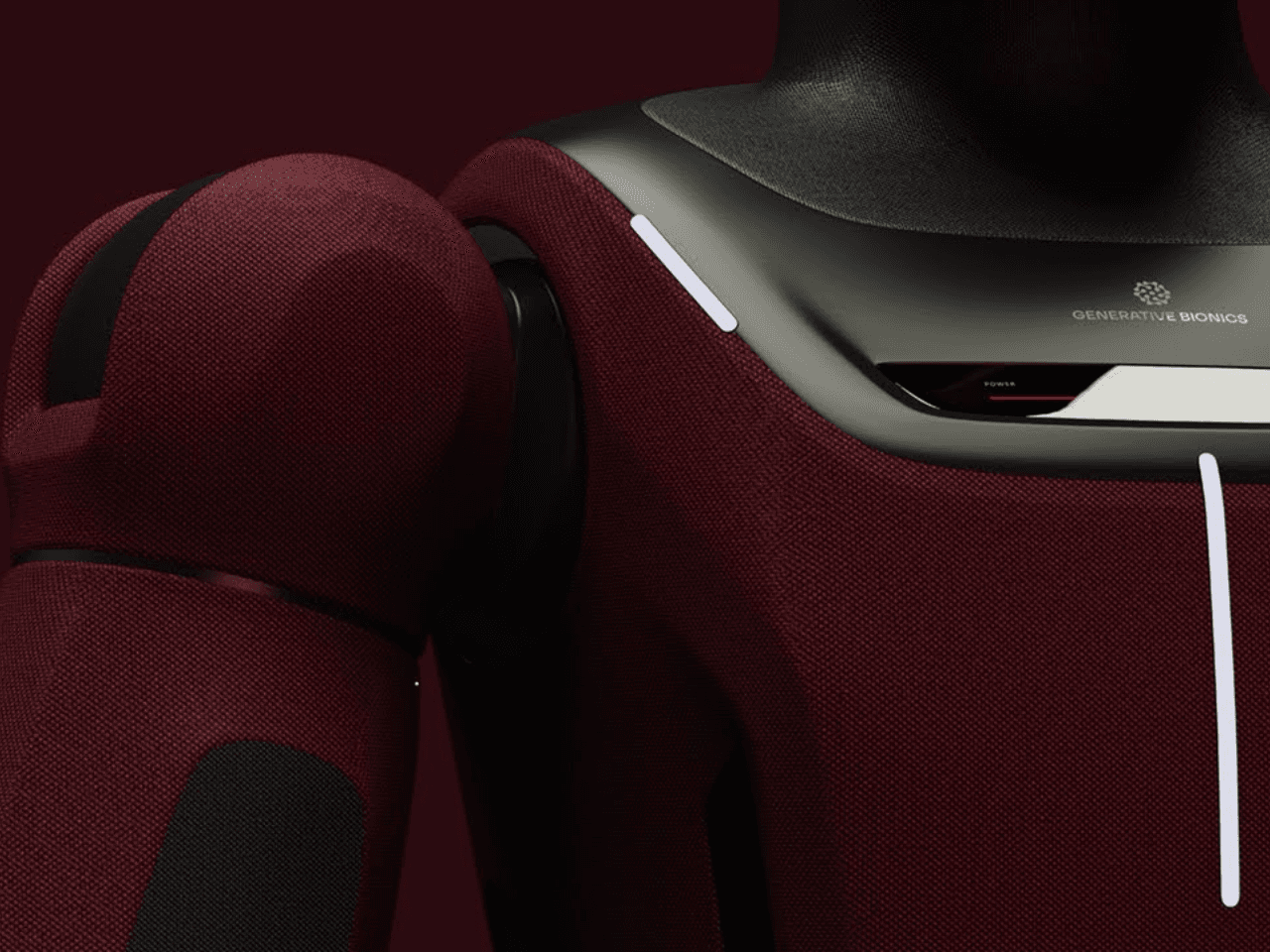
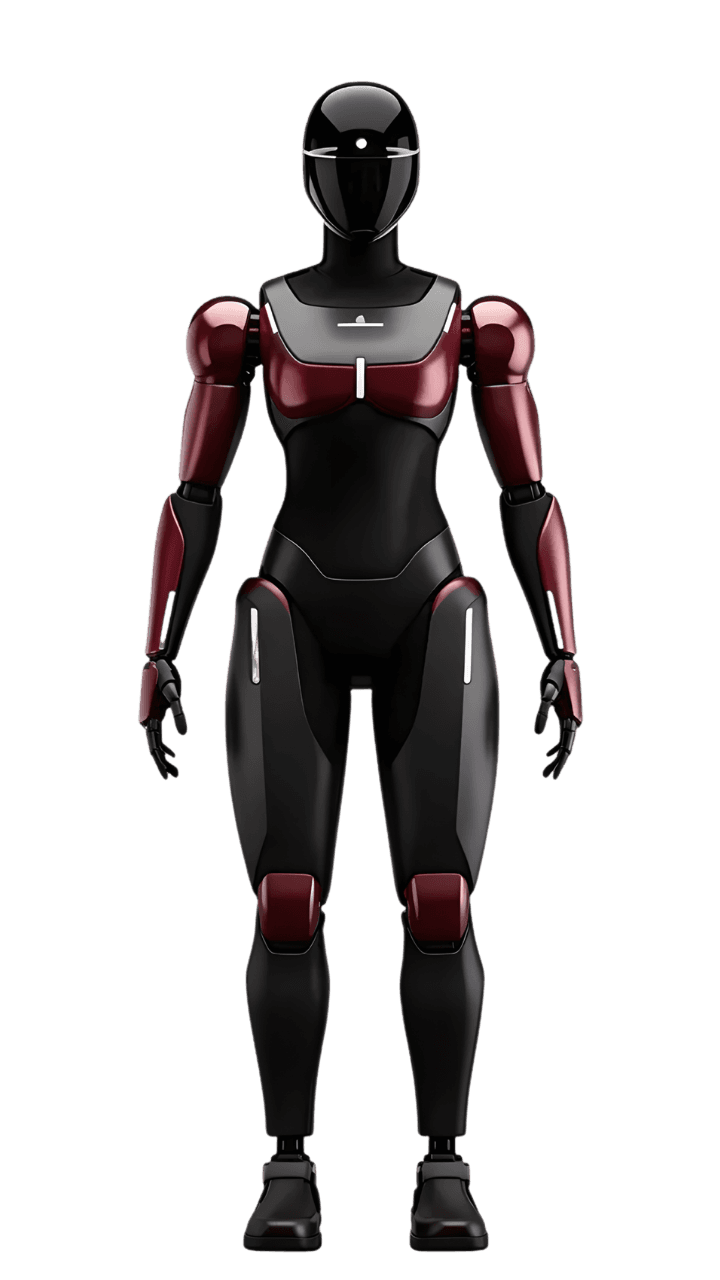
Italian humanoid concept with full-body tactile skin and AMD-powered Physical AI, born from IIT's humanoid robotics lineage.
GENE.01 is a humanoid robot concept developed by Generative Bionics, an Italian robotics startup based in Genoa and led by roboticist Daniele Pucci. The platform showcases the company’s vision for a new generation of physically intelligent humanoid robots. Generative Bionics builds on research in embodied intelligence and human-centered robotics, drawing inspiration from the Italian Institute of Technology’s iCub program. A defining feature of GENE.01 is its full-body tactile skin, which integrates a dense network of touch and force sensors to detect pressure and physical contact across the robot’s entire body. The platform also employs a distributed computing architecture powered by AMD CPUs, GPUs, and FPGAs, allowing perception, control, and AI processing to occur close to the sensors and actuators instead of relying on a single central processor.
Material handling, warehouse operations, and fulfillment