Sensing
- Force sensing (100 gf without tactile sensors)
- Fingertip force > 40 N
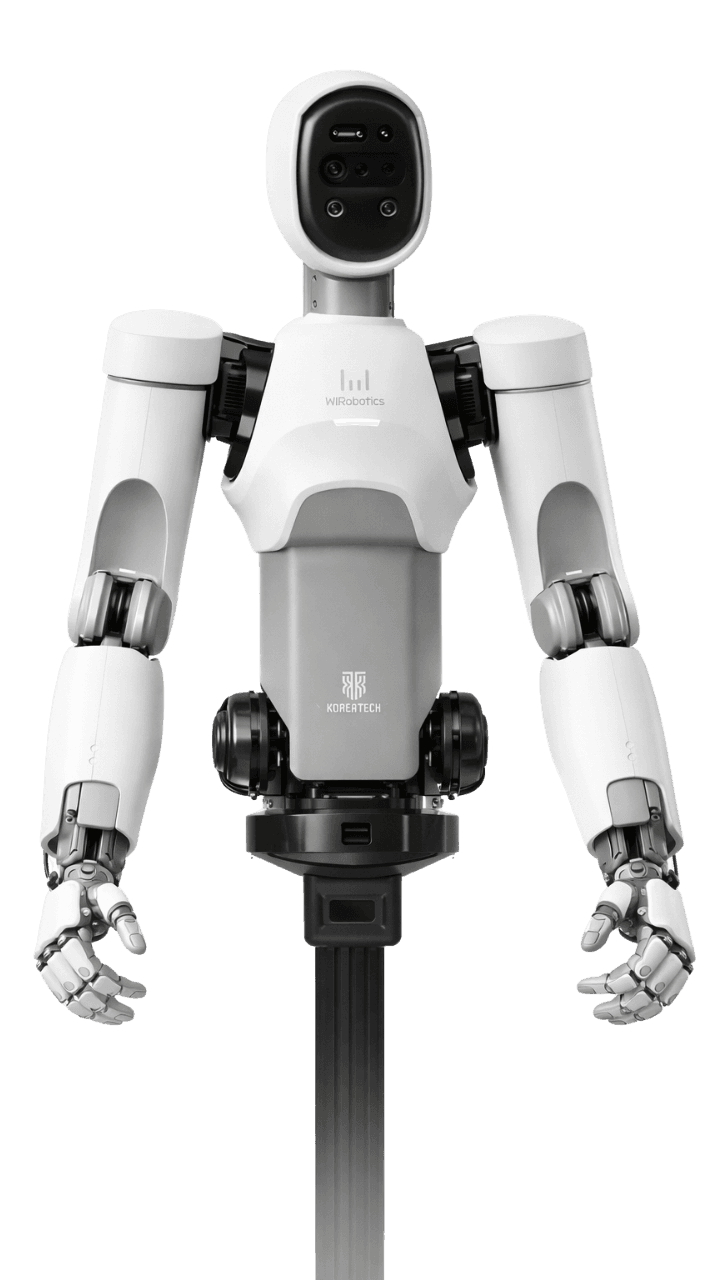
A general purpose humanoid robot with human like responsiveness, featuring 15-DOF hands, ultra low friction backdrivable arms, and force sensing without tactile sensors.
ALLEX is a general-purpose humanoid robot developed by WIRobotics, a company based in Cheonan, South Korea, and founded in 2021 by former engineers from Samsung's robotics team. Its focus is human-like responsiveness and dexterity rather than raw strength. Each hand has 15 degrees of freedom at roughly the size of a human hand, with fingertip forces up to about 40 newtons, a hook grip over 30 kilograms, and fingertip repeatability within a fraction of a millimeter. The arms are ultra-low-friction and backdrivable, with far less friction and rotational inertia than conventional collaborative-robot arms, and the system senses and responds to contact force across arms, hands, and waist without traditional tactile or force sensors, detecting loads as small as a fraction of a newton. That compliance is meant to make ALLEX safe and adaptable around people and delicate objects.

Patient care, rehabilitation, and facility support