Sensing
- Camera-based vision (no LiDAR)
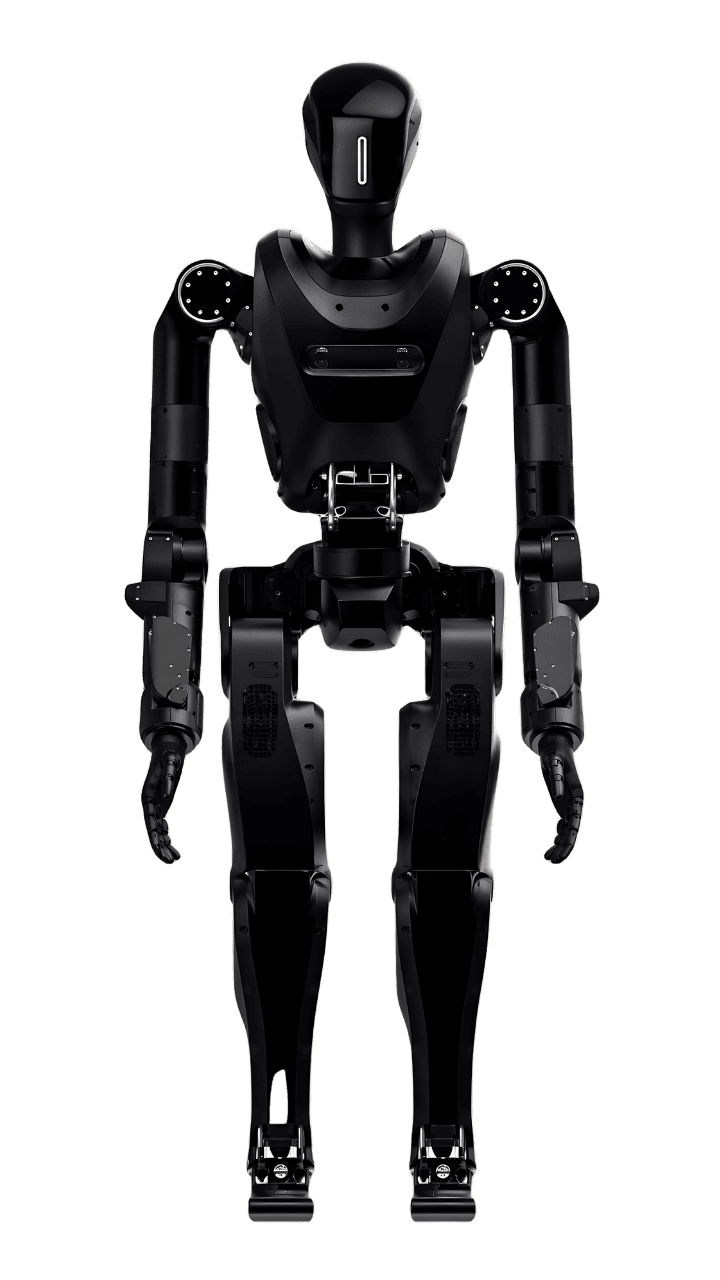
General-purpose humanoid with camera-first AI perception, 20 kg payload, and embodied language-driven control.
Phantom MK1 is a general-purpose humanoid robot developed by Foundation Robotics Labs, a robotics company based in San Francisco, California. Built for demanding commercial and government applications, the platform combines high-strength hardware with embodied AI to perform physical tasks across manufacturing, logistics, infrastructure, and hazardous environments. Foundation Robotics Labs is developing Phantom as a versatile humanoid capable of operating wherever human labor is difficult, dangerous, or inefficient. The robot stands approximately 1.75 meters tall, weighs around 80 kilograms, and can carry payloads of up to 20 kilograms. It features five-finger dexterous hands and proprietary back-drivable cycloidal actuators that deliver high torque while maintaining compliant, human-safe movement. Its perception system relies primarily on cameras and AI vision, reducing dependence on LiDAR while supporting autonomous navigation, manipulation, and environmental understanding. Phantom MK1 is powered by Foundation Robotics Labs’ embodied AI software stack, which combines large language models with motion planning and autonomous control to translate natural language instructions into physical actions.